目視から自動へ

6軸ロボットと3Dカメラを組み合わせ、溶接ビードを自動で外観検査
- 高速・高精度
- 使いやすい
- 安心サポート
溶接外観検査とは?
ロボットで自動溶接された溶接ビードの多くは、
検査員の目でその外観を1つずつ、目視検査されています。
この工程は人件費が発生するだけでなく、
検査員の技量の差で検査品質が均一にならないという課題があります。
このような課題を解決するために開発されました。
対象ワーク例

自動車部品
重機械

鉄道車両

鉄骨系住宅
上記以外でも自動溶接されたワークの外観検査でお使いいただけます。
特長
溶接外観検査に”特化”したから使いやすい。
特許*を取得した独自のスキャンアルゴリズムでNGを見逃しません。
さらに、アーク、レーザー、テーラードブランク溶接といった最先端の溶接技法にも標準対応しています。
高速&高精度スキャン
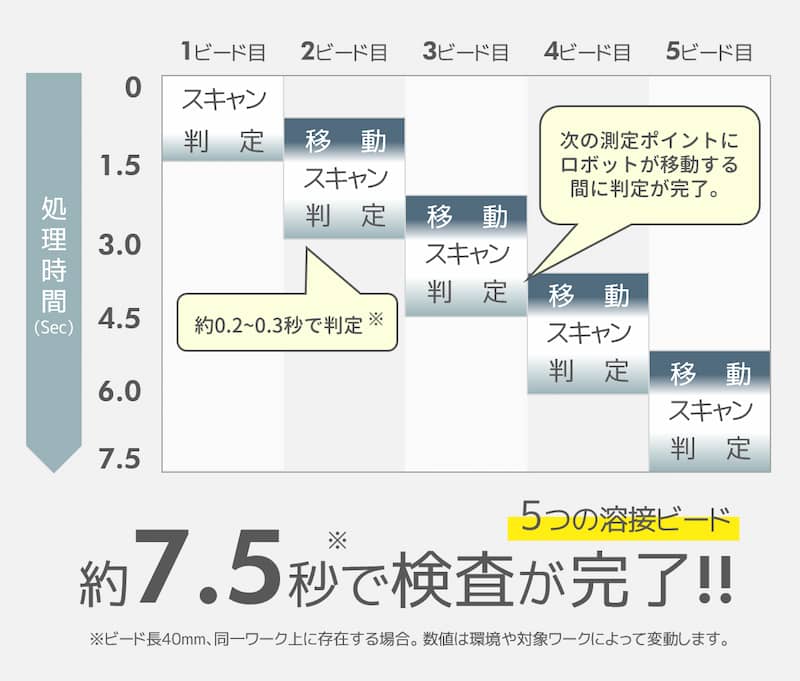
1ビードあたり約1.5秒の高速処理で検査を行います。
溶接の長さが40mmであればスキャン後、約0.2~0.3秒で判定可能なため、次の測定ポイントへロボットが移動する間に判定が終わります。
仮に1つのワークに5か所の溶接ビードがあれば1.5秒×5か所=7.5秒で検査が終了します。
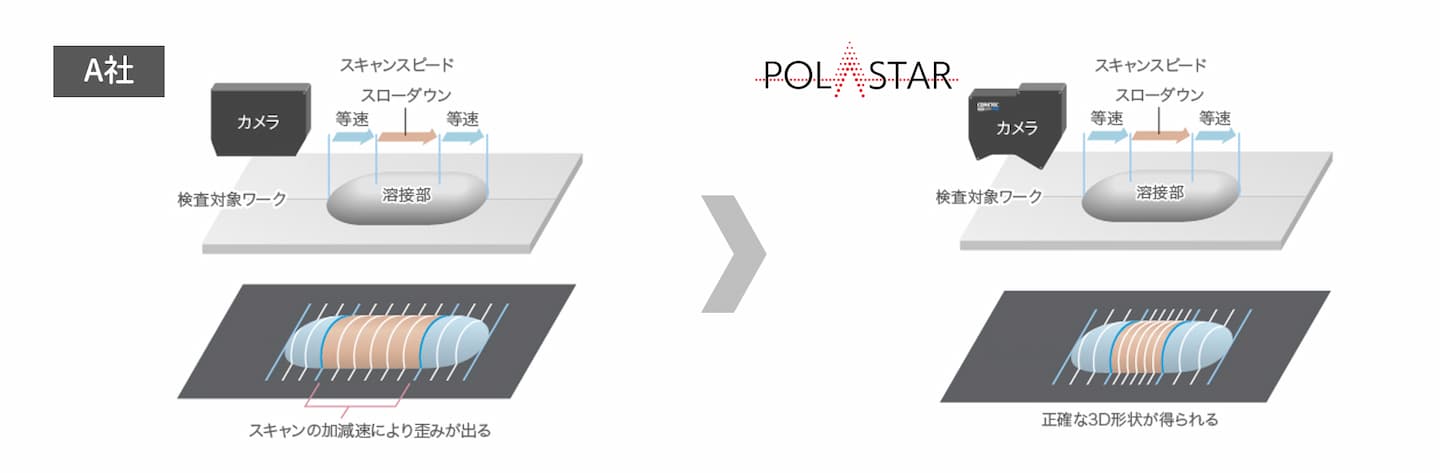
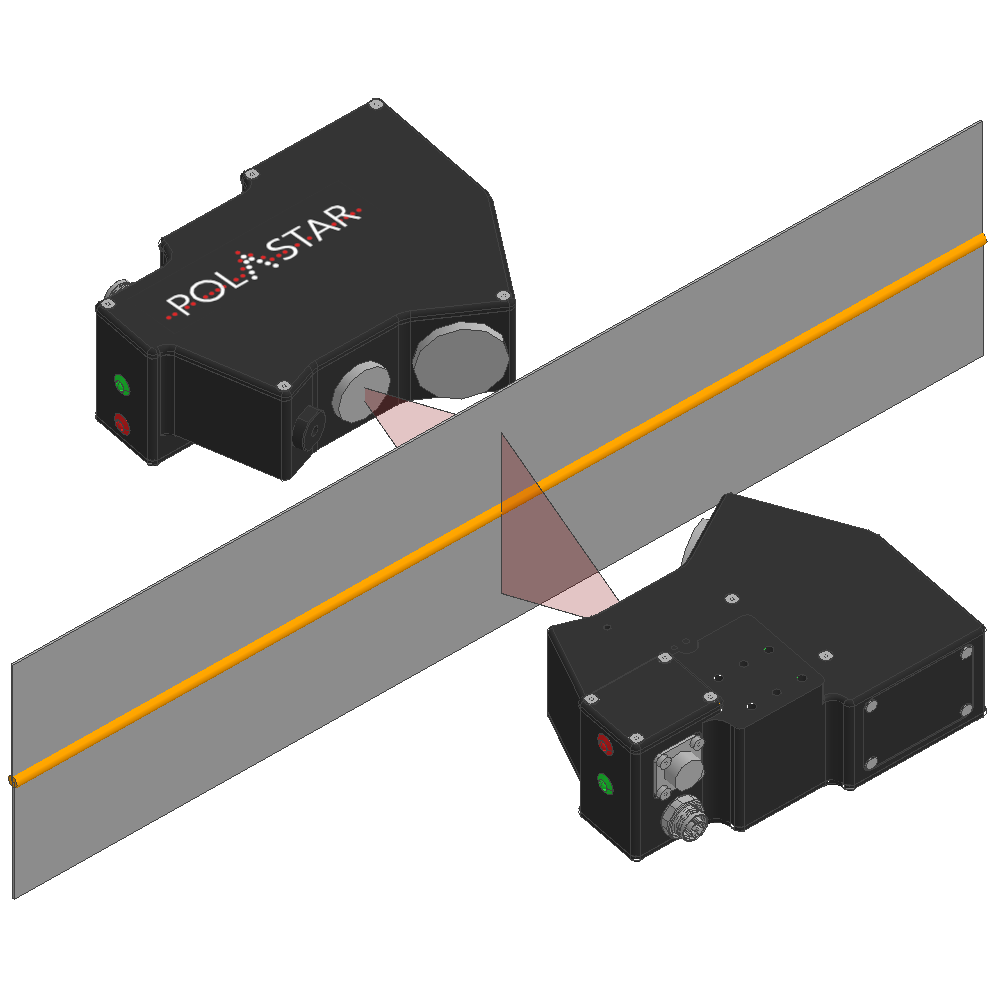
POLASTARは3Dスキャンと同時に、ロボットの位置・姿勢情報を常時取得しており、スキャン中に加減速が発生しても正確な3Dデータを得ることが可能です。
さまざまな制約があるインラインでの環境でも、スムーズなロボットティーチングに寄与します。
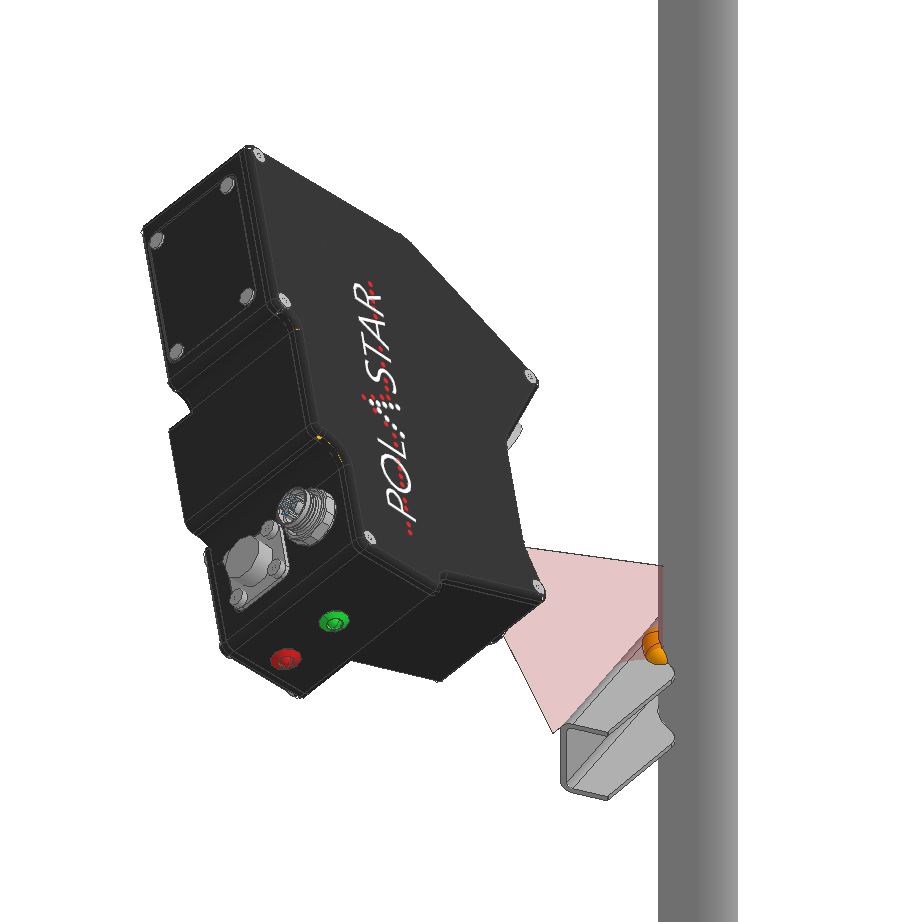
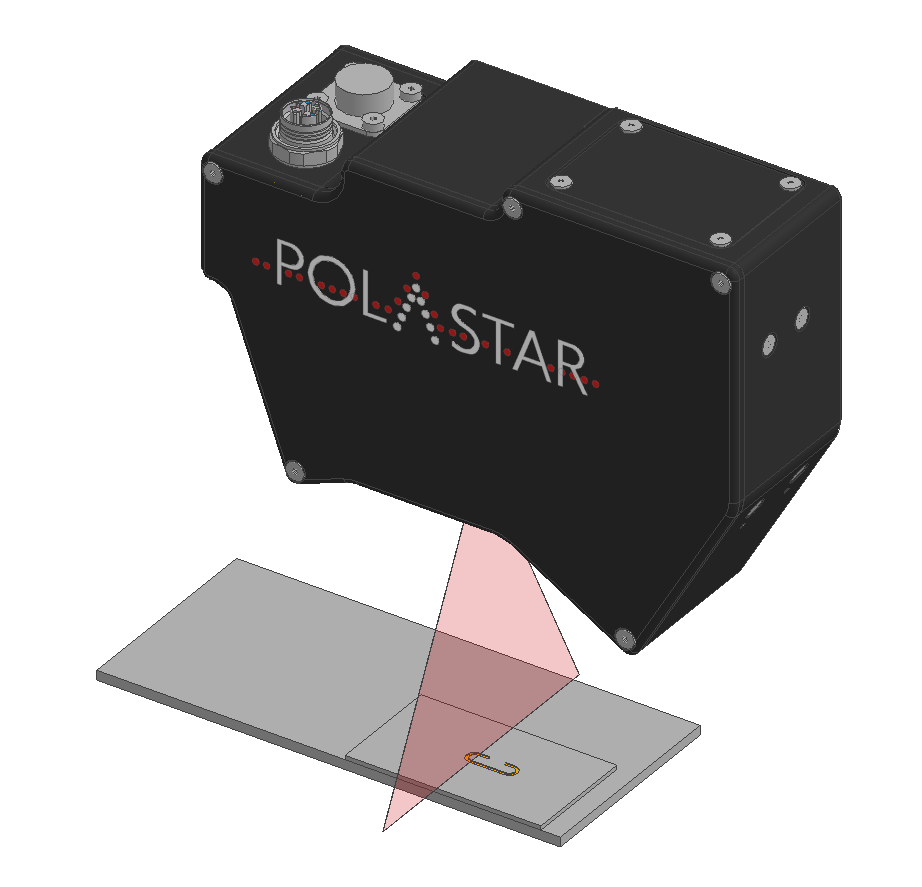
一般的な3Dカメラでは、溶接トーチの走行線と重ね合わせるように3Dスキャンを行う必要があります。POLASTARは、溶接時の走行線に制限されることなく3Dスキャンができるため、隅肉溶接のような空間が限られたワークでも、自由な位置から3Dスキャンが可能です。【特許: 第5758090】
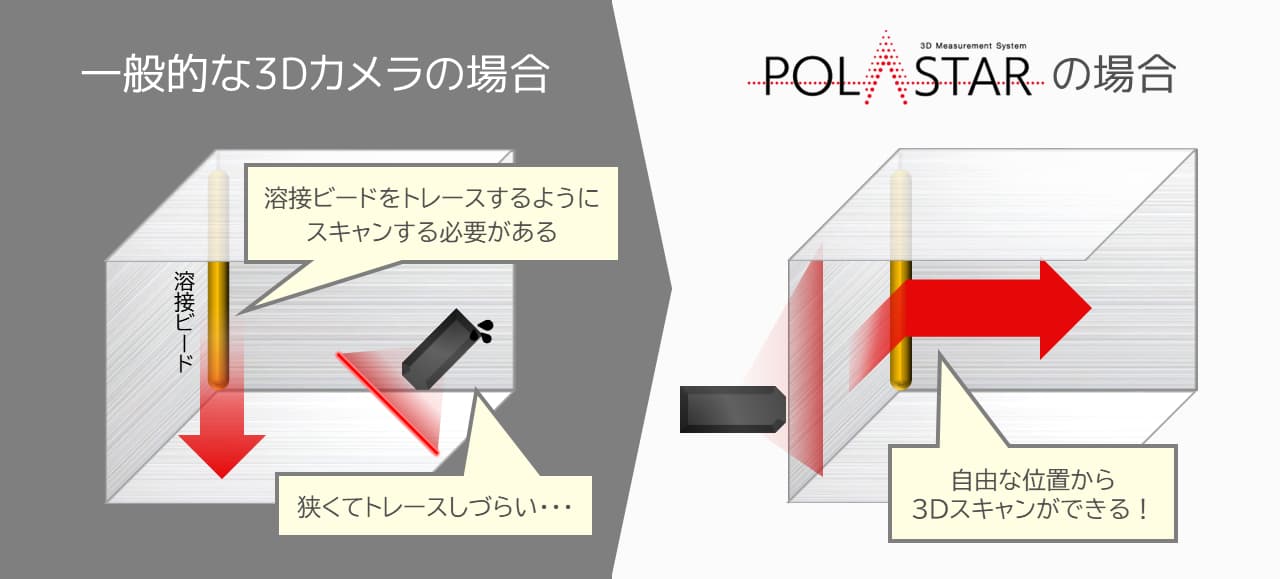
ビードの形状に沿わせる必要がないため、自由な位置から3Dスキャンが可能です。

最短ルートでのスキャンできるため、時間の短縮にも繋がります。
ワークセットなどで発生するワークの位置ズレを自動補正。
一般的な3Dカメラだと難しかったアライメントも、POLASTARであれば自動で位置を補正し、外観検査を行うため、位置ズレの影響を受けることなく検査が可能です。
使いやすい
アーク溶接
テーラード
ブランク
レーザー溶接
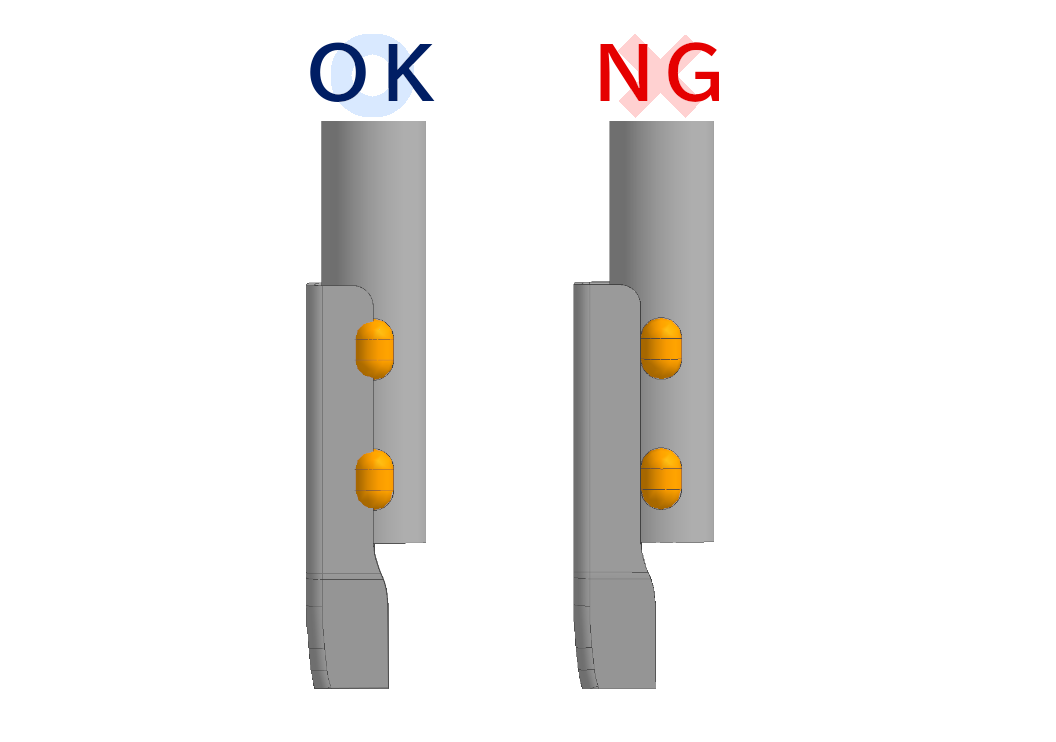
「取付部品の位置ズレ」による溶接不良。
溶接ビードは規定位置にあっても、部品のセット位置がズレてしまうことで不良となります。
溶接ビードの形状だけを基にした判定では、これらを検出するには限界がありました。
部品取付位置のズレによる「溶接の中心ズレ」、「脚長」といった検査項目により良否判定が可能です。
3D形状データから各項目の寸法を計算し、判定閾値と比較してOK/NGの判定を行います。万が一、NG判定された場合でもどの検査項目がNGだったのかを特定が容易です。
事前に登録しておいたマスターの3D形状データとの比較ではありません。
安心サポート
コアテックでは、POLASTARを安心してお使いいただけるように、4つのサービスを実施しています。
検収前に操作講習を開催し、基本的な設定や操作方法のレクチャーを行います。
導入後は、電話やメールによるご質問やご相談を承っております。


まずは、無料でお試しください
ワークを御支給いただいて、
専用テストブースで実際にスキャンから、良否判定までを無料でお試しいただけます。
実際の操作感と、判定を実際にご確認ください。
「このワークは検査できる?」と判断が難しい場合でも、ぜひ1度ご相談ください。
