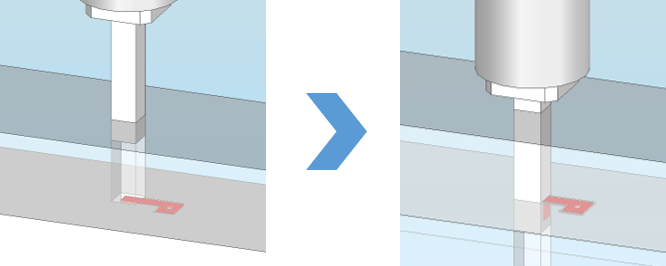
HOME A ロボットで保持した状態でスキャンしたデータと、治具にセットした状態でスキャンしデータを合成したいのですが、うまく合わせる方法がありますか。距離が離れすぎていて基準側データと合成側データが同じ画面内で見つかりません。 「重心位置一致」というボタンを押すと二つのスキャンデータを重心位置で重ねることが出来ます。 ここから位置と姿勢を調整するのが簡単だと思います。 Tweet Hatena RSS Pin it PC2が動かなくなったため、PCを交換し、SSDのみ故障元のものを使用したが、C... ソフトの対応OSを教えてください。 関連記事一覧 サーボプレスの動作設定が”超”カンタンにできる新機能 2023.06.20【サーボプレス】 アーク溶接とは?基礎知識と仕組みを解説! 2025.05.26【POLASTAR-三次元計測】 端子曲げ成形の事例 2021.02.22【サーボプレス】 【プレス機更新で失敗しない!】段階的な自動化でROIを最大化... 2025.09.11【サーボプレス】